About Me
Hi! I'm The Aypisam FPV, a French computer science & AI student at CESI.
Everything you know about me, you know it only because I let you.
Latest News
Currently developping an end2end AI-based Autopilot like Tesla's FSD.
(plz send RTX5090)
My Projects
DockSight
A highly complex Proof of Concept (POC) for a vision-only system to detect, track, and position containers in 3D space.
Developed during an internship, it integrates advanced YOLO-based detection, single-optic visual odometry and GPS for camera tracking and positioning, and 3D visualization using the Ursina engine.
Note: This is an internal company project and is not publicly available.

Autopilot
Vision-based trajectory planning from two consecutive front camera frames, with optional ego-history context and a non-uniform 3-second prediction horizon.
The current primary model is Motion-FPN + Cross-Attention Kinematic V2, outputting 12 future kinematic states (speed_mps, yawRate_radps). It is currently training on the NVIDIA PhysicalAI-Autonomous-Vehicles dataset.
Video below shows a legacy Early Fusion + Attentive GRU model demo.

Bad Apple on BatPU-2
This project is a port of the Bad Apple video to the BatPU-2, a 8-bit computer designed by mattbatwings in Minecraft, programmable in ASM using a custom instruction set.

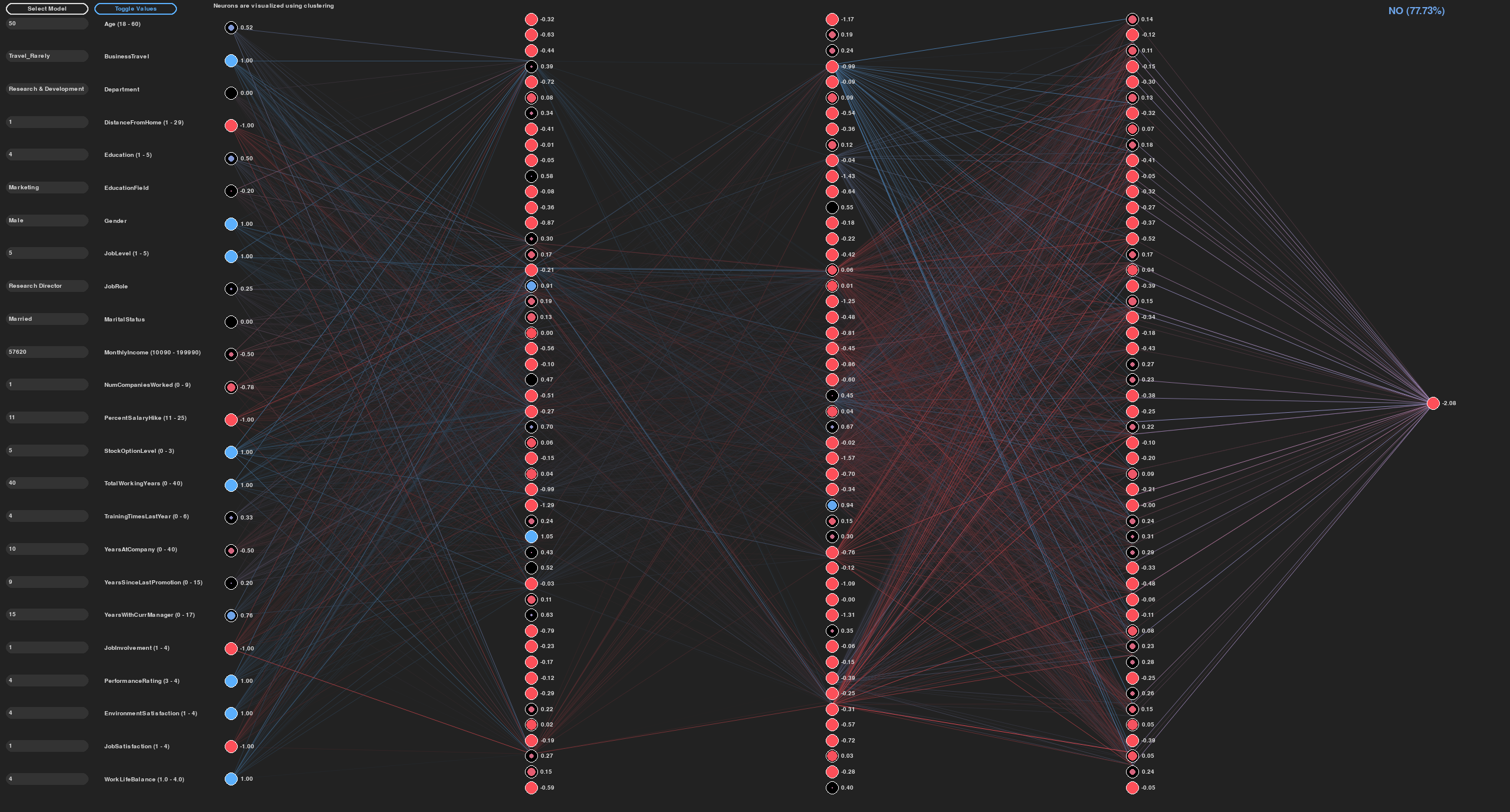
Neural Network Visualisation
Python tool used to visualize and use a Neural Network.
CESI Bad Apple
I use at least one thing learned during a course to play Bad Apple!! (Video and/or Sound)